10月20日,记者从中山大学获悉,在刚完成的2025年“中山大学极地”号北冰洋科学考察中,由我国科研人员自主研发的“极蛙”双运动模式水下机器人(以下简称“极蛙”AUV),成功完成冰区下潜任务,为研究北冰洋冰底环境提供了关键技术支撑。

“极蛙”AUV布放现场。中山大学供图,下同
记者了解到,“极蛙”AUV由南方海洋科学与工程广东省实验室(珠海)资助、中山大学遥感科学与技术学院、海洋科学学院联合兄弟单位共同研制。“极蛙”AUV具备水下巡游和爬行两种运动模式,可在复杂环境中灵活切换,搭载多类型传感与成像设备,包括CTD、ADCP、水下双目摄像头和多波束声呐等。在该航次中,“极蛙”AUV分别在低密集度冰区和高密集度冰区完成两次下潜任务,各项性能运行稳定,系统验证了其操控性能,并实现了对冰下水文环境与冰体形貌的综合调查。
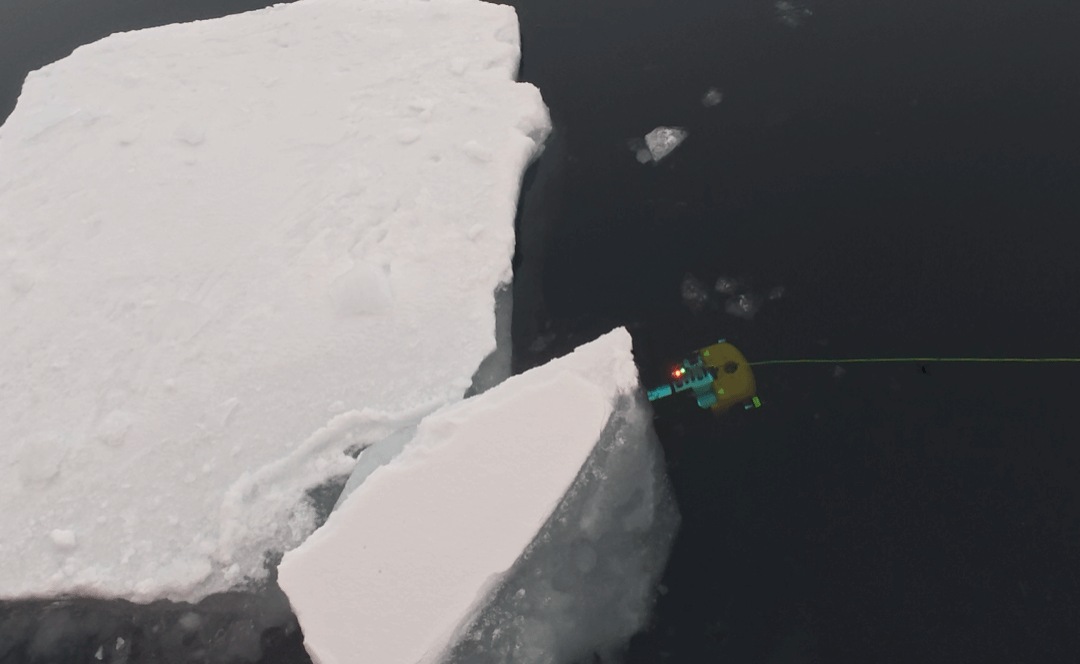
“极蛙”AUV双模水下机器人进行水下航行与冰底形貌观测。
中山大学极地科学考察队领队、中山大学遥感科学与技术学院教授陈卓奇表示,“‘极蛙’AUV在极地环境中的稳定表现,展示了我国自主研发的新型潜航器在极端环境下的应用潜力与科研价值,为国家重点研发计划项目提供了有力装备支撑。”
考察期间,4名科考队员在北冰洋高纬度冰区开展冰下作业,利用“极蛙”AUV实现了冰底地形与冰下环境的联合探测。中山大学极地科学考察队队员、中山大学遥感科学与技术学院博士新生李毅博介绍:“‘极蛙’AUV相较传统无人潜航器具有轻量化、高机动性与多模态运动等显著优势,能够适应多样化的观测需求。”
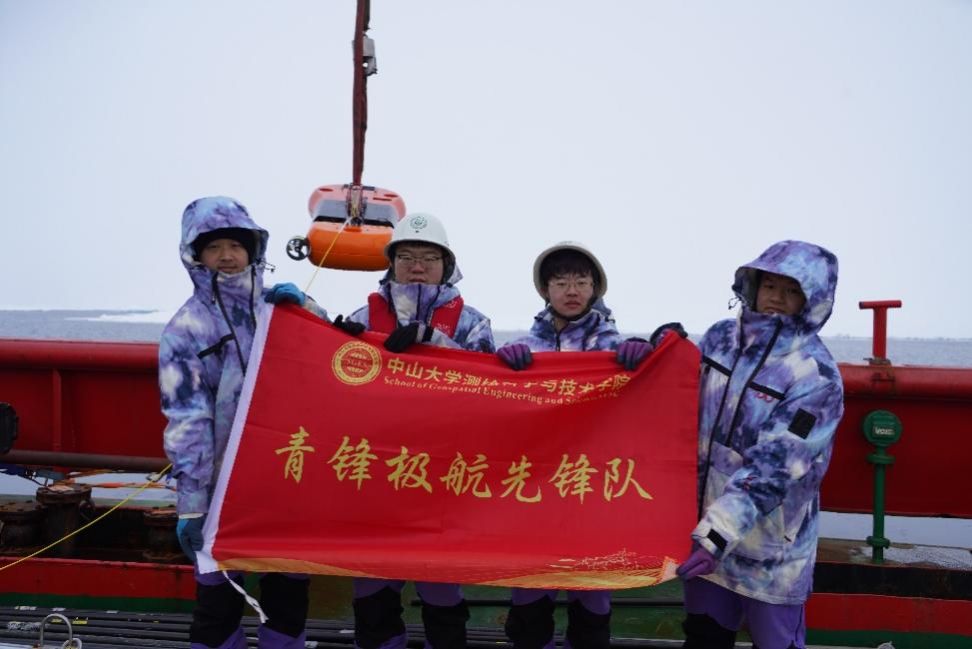
“青锋极航先锋队”科考队员与“极蛙”AUV合影。
“本次任务不仅完成了科学考察目标,也有效锻炼了青年科研人员的现场应变和动手能力。”本航次首席科学家、中山大学遥感科学与技术学院教授王天星表示,培养极地优秀后备人才的工作贯穿了航次始终。李毅博等4名执行队员均为在读博士研究生,全程参与了AUV设备调试、布放操作与数据处理,积累了宝贵的极地作业与工程实践经验。
 官方微信
官方微信

